Navy Overview
Navy is the SSD optimized cache engine leveraged for Hybrid Cache. Navy is plugged into cachelib via the nvmcache interface and turned on by NavyConfig.
Features
- Manages terabytes of data
- Efficiently supports both small (~100 bytes) and large (~10KBs to ~1 MBs) objects
- Sync and async API (supports custom executors for async ops)
- Cache persistence on safe shutdown
- Comprehensive cache stats
- Different admission policies to optimize write endurance, hit ratio, IOPS
- Supports Direct IO and raw devices
- Supports async IO with either io_uring or libaio
- Supports Flexible Data Placement (FDP) to improve write endurance of the device
Design overview
There are three over-arching goals in the design of Navy
- efficient caching for billions of small (\<1KB) and millions of large objects (1KB - 16MB) on SSDs.
- read optimized point lookups
- low DRAM overhead
Since Navy is designed for a cache, it chooses to sacrifice the durability of data when it enables the accomplishment of the goals above. Caches are effective by constantly churning through the items based on popularity, making them write intensive. Since write-endurance is a constraint for NVM, the design of Navy optimizes for write-endurance as well.
Architecture overview
Below figure shows the main components of Navy engine.
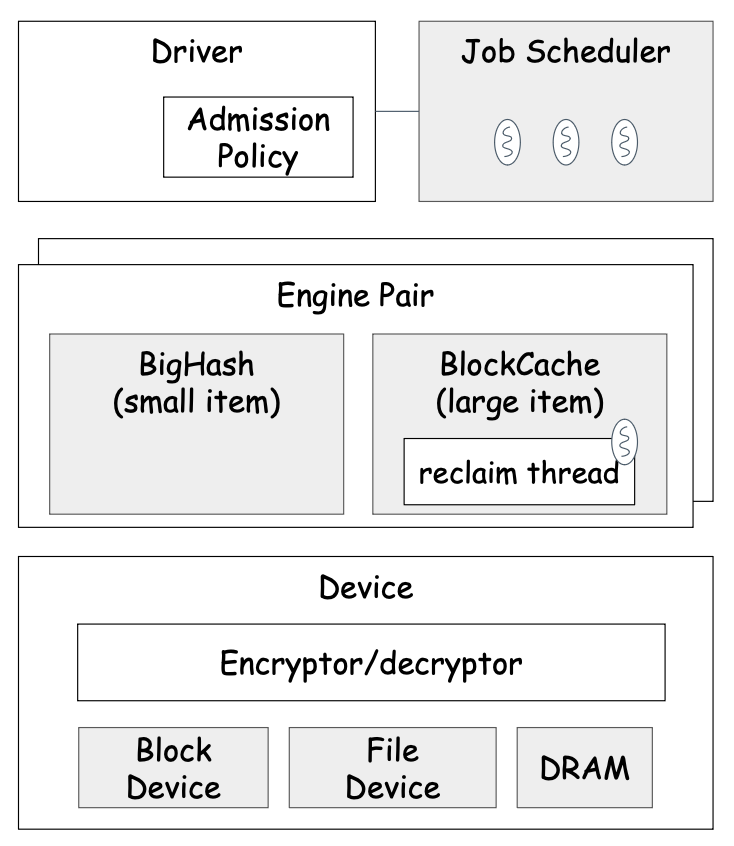
Engine Driver
The engine driver is a simple layer providing the NVM cache interface (i.e., AbstractCache) to DRAM cache.
Other than that, the Driver is also responsible for performing admission control for insertion and reinsertions (for BlockCache only). Specifically, the admission policy determines whether to accept items to NVM cache or not depending on different criteria or conditions in order to control the burn rate of the SSD or optimize the NVM cache usage for hit rate or overhead.
There are two levels of admission policies employed; NVM admission policy and Navy admission policy.
NVM Admission Policy
The NVM admission policy is mainly to optimize the NVM space usage (for, e.g., higher hit ratio) and the user can provide an arbitrary admission policy implementation.
Navy Admission Policy
The Navy admission policy is more focused on controlling the burn rate of the SSD by rejecting items randomly for optimizing the endurance of SSD and IOPS. Currently, Navy implements the following Navy admission policy mechanisms that can be enabled:
RejectRandomAP: Writes are probabilistically rejected based on a configured probabilty.- This policy just rejects P% of inserts, picking victims randomly. This policy lets user to reduce the write rate (and so, increase flash lifetime).
DynamicRandomAP: Tracks the bytes written at device level and ensures the daily budget is under a specified write rate. This is done by doing probabilistic rejection where the rejection probability is updated every X seconds based on the bytes written so far and the budget available for the future. To support this, the bytes written fromDeviceis plumbed into the admission policy.- This is smart
RejectRandomAP. User specifies maximum amount of data that can be written to the device per day. Policy monitors write traffic and as it grows beyond target (how much can be written up to this time of the day) it starts randomly reject inserts. It prefers to reject larger items to make hit ratio better. This behavior is tunable. It allows user ultimately control flash wear out.
- This is smart
There are also several parameters that can affect whether the item will be rejected:
MaxConcurrentInserts: writes are rejected once the number of the outstanding inserts including those queued for spooling reached the specified limitMaxParcelMemory: Each insert job has a memory footprint associated. Writes are rejected once the total amount of memory footprint for all outstanding inserts has reached the limit
Job Scheduler
Driver enqueues the API request as a Job to the JobScheduler. The jobs can be one of the following types; JobType::Read for jobs corresponding to read APIs for Navy (i.e., lookups), JobType::Write for jobs corresponding to write APIs for Navy (inserts and deletes). JobScheduler is responsible for executing the jobs using its Navy threads.
In order to avoid data races, the job scheduler makes sure at most one job is running for each key via spooling; i.e., the succeeding jobs for the same key are spooled in a queue until the preceding (outstanding) job has been completed. This is important given the async nature of the navy API. With this guarantee, callers can make assumptions about the concurrency of operations once enqueued to navy. This is relevant to using optimistic concurrency by NvmCache implementation.
For the time being, there are two types of the job scheduler provided; OrderedThreadPoolScheduler and NavyRequestScheduler. The difference is that OrderedThreadPoolScheduler runs jobs to completions (including retries), while NavyRequestScheduler schedules jobs fully asynchronously as Fiber (i.e., lightweight application thread) to FiberManager. Since NavyRequestScheduler is more lightweight and scalable, OrderedThreadPoolScheduler will soon be deprecated.
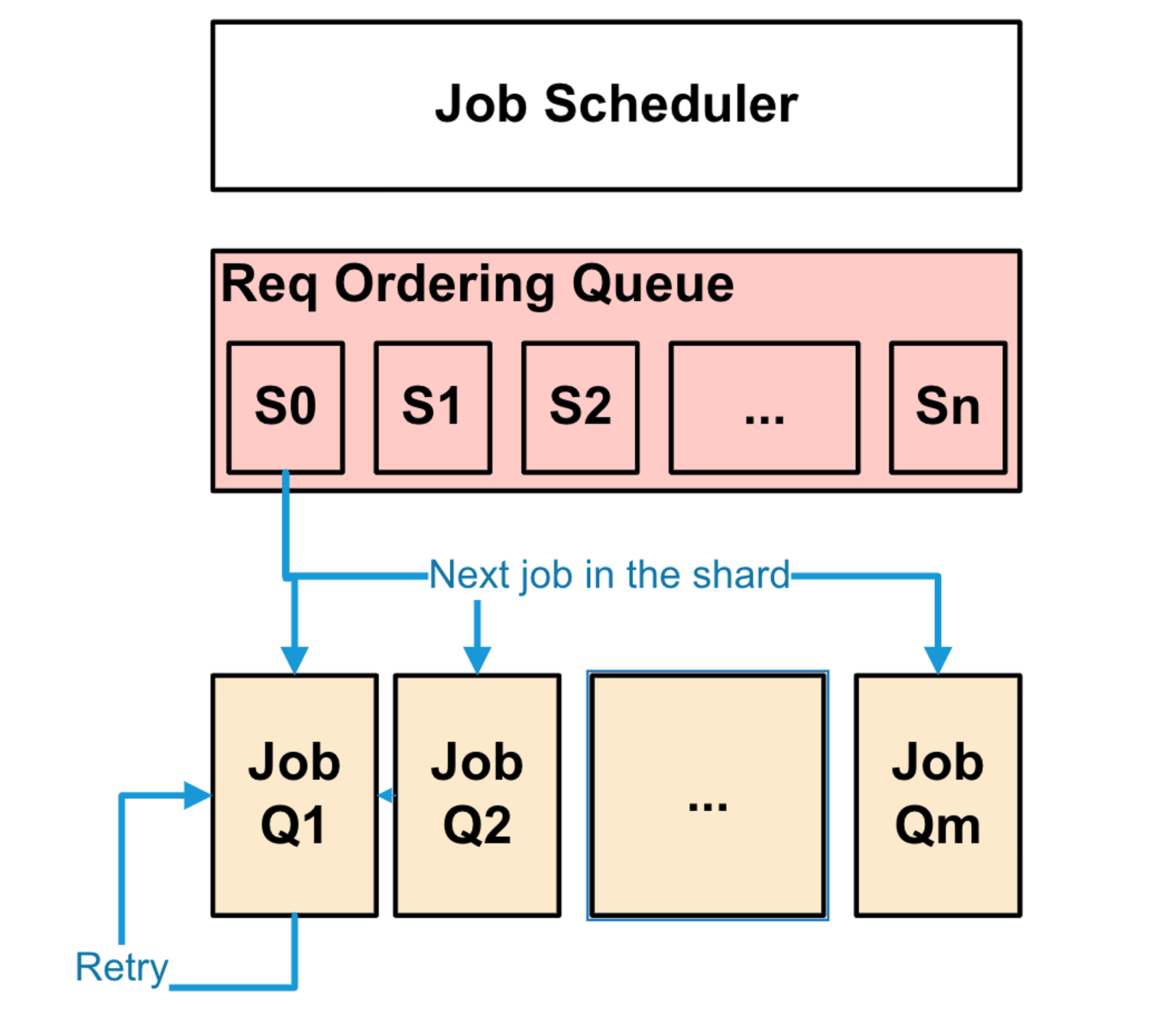
OrderedThreadPoolScheduler (to be deprecated)
To order the jobs, OrderedThreadPoolScheduler shards the jobs based on its key into one of several fine grained shards (millions). There can be only one job executed for a given request ordering shard at any given time, and if there is already one being executed, the rest are queued up in a pending job queue. Once the ordering condition is met, Jobs are sharded to be enqueued into one of several JobQueue.
The OrderedThreadPoolScheduler has two executor thread pools (read and write) and Jobs are sharded by key to the appropriate thread pools. Except JobType::Read all other jobs are executed by the writer pool. Each thread in the pool has a corresponding JobQueue and a dedicated thread associate with processing its jobs.
Jobs are processed in FIFO manner and always run to completion, meaning any blocking of a job execution (e.g., for device IO) will block the whole thread until being unblocked.
Jobs can also be retried based on their exit status returned from the implementation. For example, when performing an insert, the job returns to scheduler with returning RETRY if there is no space left for insertion, so that the scheduler can invoke it again later for retry. Jobs are always enqueued to the back of their queue for retry.
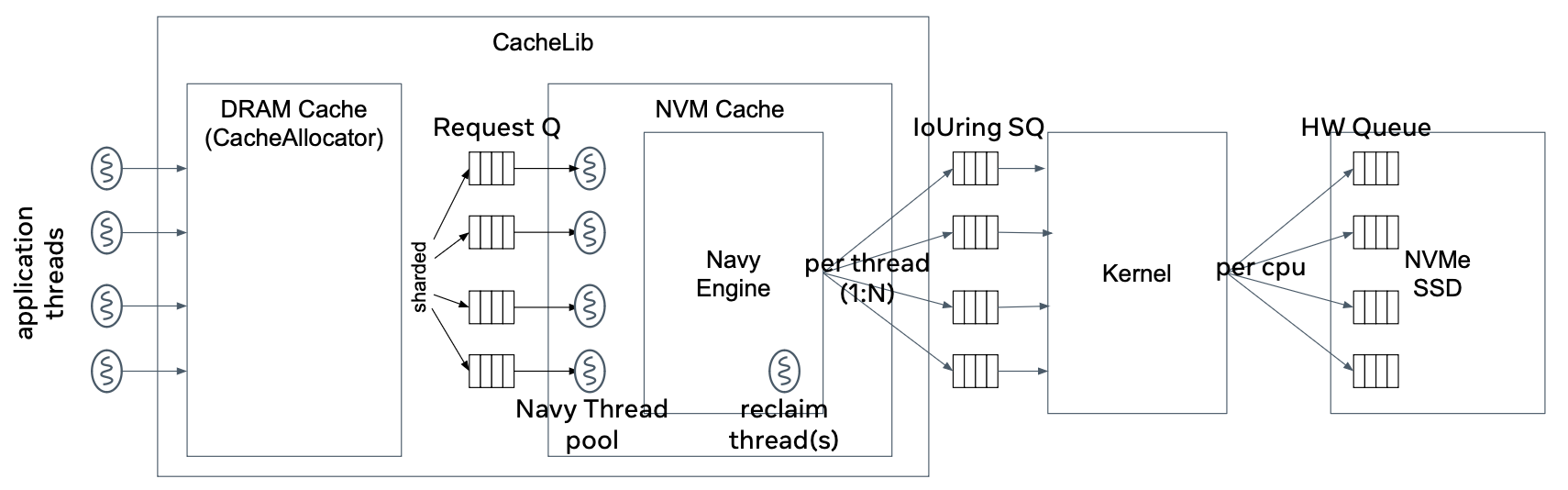
NavyRequestScheduler
To order the jobs, NavyRequestScheduler also uses the same mechanism as OrderedThreadPoolScheduler. I.e., NavyRequestScheduler shards the jobs based on its key into one of several fine grained shards (millions) and make sure only one job is outstanding by spooling jobs on the shard-specific pending queue.
The NavyRequestScheduler also has two executor thread pools (read and write) and Jobs are sharded by key to the appropriate thread pools. Except JobType::Read all other jobs (i.e., insert and delete) are executed by the writer pool.
However, unlike OrderedThreadPoolScheduler, NavyRequestScheduler schedules jobs simply submitting the job as a fiber to the FiberManager that are driven by the Navy worker thread. The jobs are dispatched to workers in the pool in round-robin manner.
Since the jobs are running as a fiber, the job is simply descheduled on blocking for mutex (TimedMutex which is fiber compatible) and the FiberManager schedules the next fiber in the FiberManager queue. Note that this needs to be paired with appropriate async IO engines at Device layer to run the Navy jobs fully async. Below figure shows the queuing architecture of async navy and io operation using IoUring.
Engine
The engine is the core of Navy and implements actual NVM caching algorithms. In order to support wide range of item sizes, Navy provides two types of engines (i.e., BigHash and BlockCache) which are paired as EnginePair. The user can configure multiple EnginePairs on a same Device for space isolation purposes, where EnginePair serves as analogous to the pool for DRAM cache. The user can provide the engine pair selector to decide which EnginePair to be used for given item.
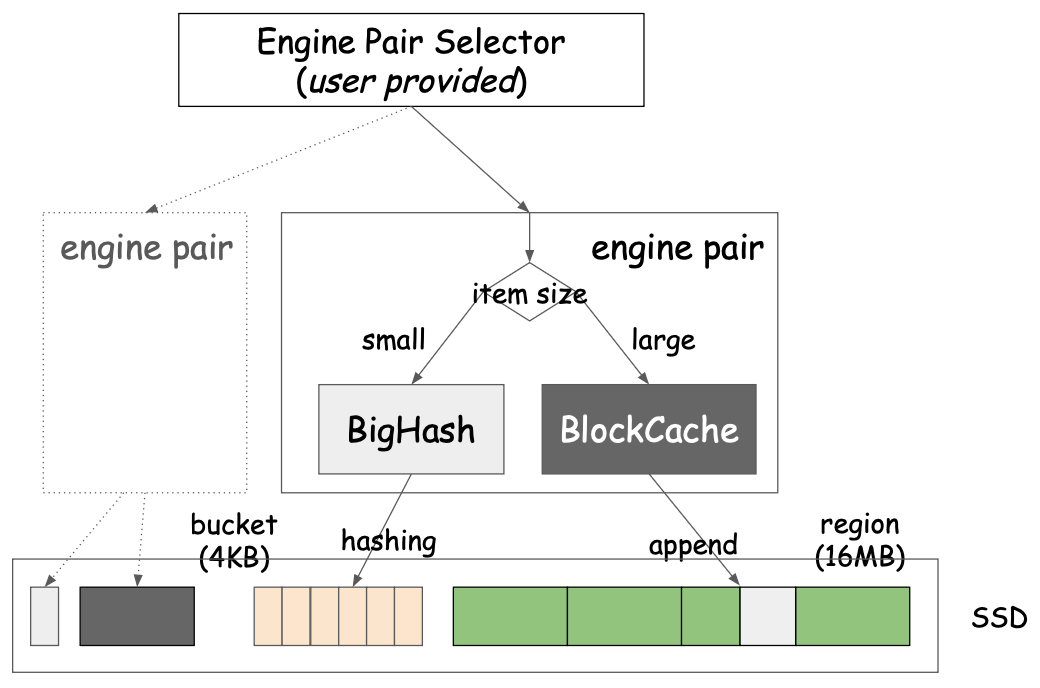
BigHash is an engine to store small items (less than device block size). Block Cache (BC) is an engine to store large items (about or greater than device block size). Engines operate independently. The user can set the maximum item size for BigHash which is then used to determine which engine to use to insert items.
This implies that items can be cached in either the small or the large item engine depending on their size. While, size is known during insert, lookups and deletes don't, and hence must check both engines before concluding. Specifically, for lookup, driver performs the lookup in the Large Item engine first and upon a miss, it performs the another lookup on the small item engine. For delete, driver performs the delete to both the small and large item engines.
Besides this, there are no high level locks per key to synchronize concurrent operations across both the engines.
BigHash
BigHash is effectively a giant fixed-bucket hash map on the device. To read or write, the entire bucket is read (in case of write, updated and written back). Bloom filter used to reduce number of IO. When bucket is full, items evicted in FIFO manner. You don't pay any RAM price here (except Bloom filter, which is 2GB for 1TB BigHash, tunable).
Read more in Small Object Cache
Block Cache
On the other hand, BlockCache divides device into equally sized regions (16MB, tunable) and fills a region with items of arbitrary sizes in append only manner.
BlockCache stores compact index in memory: key hash to offset. We do not store full key in memory and if collision happens (super rare), old item will look like evicted. In your calculations, use 12 bytes overhead per item to estimate RAM usage. For example, if your average item size is 4KB and cache size is 500GB you'll need around 1.4GB of memory.
Since BlockCache stores insert data in append manner to the active regions, it requires to perform the reclaim (a.k.a. garbage collection), which basically select a region and reinsert or evict still valid items. The reclaims are performed by one or more of dedicated threads called region_manager threads when the number of reserved clean regions go below the threshold (e.g., 10). Usually, one region_manager should be enough for most of the use cases, but need to be increased if needed.
Read more in Large Object Cache
Device
Device is an abstraction of the backing NVM cache storage and provides APIs to read and write data onto the backing storage.
All IO operations within Navy happen over a range of block offsets. Device provides a virtual interface for reads and writes into these offsets. Underneath, the Device could be either a FileDevice implementation over one or more regular or raw block device files or an InMemoryDevice using a malloc-ed buffer (for testing). Device aligns all reads from its calles to ioalignSize that is used to configured the Device and trims any extra data that is read. Device also handles opaque functionality like encryption, chunking, latency measurements for reading and writing while delegating the actual reads or writes to underlying implementation.
Encryption: Device can be initialized with a DeviceEncrytor to support block level encryption. All reads and writes pass through the encryption layer and is done at the granularity of encryption block size. Usually the block size for encryption is as small as 4KB. The IO alignment for reads and writes must match the block size used for encryption.
Chunking: Large writes (MBs) can cause head of line blocking for reads on SSDs. To avoid the negative impact on the tail latency for reads, Device can be configured to break up writes into chunks and issue them sequentially. While this can increase the latency for writes, read latency can be improved. Reads are not broken into chunks.
LatencyTracking: Device also tracks the overall latency for reads and writes in a uniform way across all implementations of Device.
FileDevice
FileDevice implements Device over one or more regular or block device files. When multiple regular or block devices are used, FileDevice operates like a software RAID-0 where a single IO can be splitted into multiple IOs in the unit of fixed stripe size. Note, this striping is orthogonal to the chunking that happens with Device. Usually, the stripe size is set to the size of a Navy region(16-64MB).
For actual IO operations, FileDevice supports both sync and async operations. For async operations, FileDevice supports io_uring and libaio which are supported by folly as folly::IoUring and folly::AsyncIO, respectively.
FdpNvme
FdpNvme embeds the FDP semantics and specific IO handling. IO with FDP semantics need to be sent through the io_uring_cmd interface and FdpNvme implements interfaces to allocate FDP specific placementHandles, to prepare the UringCmd Sqe, etc. When FDP is enabled, FileDevice makes use of FdpNvme to use the FDP enabled file device path. For more informtaion read FDP enabled Cache.